Informe: comparación del escaneo láser con la reconstrucción 3DEscrito por Paul BourkeMayo de 2016
A continuación se resumen las diferencias y los méritos relativos entre el escaneo láser y la reconstrucción 3D a partir de fotografías en el contexto de la grabación en arqueología. Se pretende que sea una discusión informal dirigida a una pregunta común, a saber, “¿Debería usar un escáner láser o una reconstrucción 3D (a menudo referida como técnicas fotogramétricas) para capturar un modelo 3D de X”? Los méritos relativos se ilustrarán con un ejemplo que empleó tanto el escaneo láser como la reconstrucción 3D para capturar un modelo de refugio rocoso utilizado por australianos indígenas. Se intenta cubrir todas las consideraciones posibles para ayudar a cualquiera que contemple cuál de estas tecnologías de grabación digital utilizar. Cabe señalar que el autor es un practicante del enfoque de reconstrucción 3D. Pero se hará un esfuerzo para presentar la comparación de manera justa, señalando nuevamente que se basa en una grabación real del mismo sitio con ambas tecnologías, ya que se puede hacer una comparación directa. También señaló que, como con cualquier informe que compare tecnologías, puede quedar desactualizado a medida que se disponga de nuevos productos y algoritmos. El sitioEl refugio de rocas se encuentra en una región conocida como West Angeles en Australia Occidental. Tiene aproximadamente 50 m de largo, 20 m de profundidad y entre 1,6 y 3 m de altura. A continuación se puede ver un panorama interactivo de 360×180 del sitio.  El hardware El escáner láser utilizado fue un Leica C10 (luz verde, 532 nm). Con el fin de minimizar las zonas de oclusión debido a la naturaleza altamente enrevesada del refugio de rocas, se adquirieron 6 escaneos, cada uno desde una ubicación diferente. La posición de los marcadores de referencia fue georreferenciada con una observación cinemática por GPS. El procesamiento posterior se realizó con el software Leica Cyclone. El escaneo resultó en poco menos de 110 millones de puntos con alrededor de 80 millones del refugio y alrededores cercanos.  La fotografía para la reconstrucción en 3D fue una Canon 5D Mk III, una cámara de fotograma completo de 20+MPixel y una lente principal de 28 mm. El software para realizar la reconstrucción consistió en un paquete comercial llamado PhotoScan, así como una tubería desarrollada por el autor. Si bien una u otra de estas dos soluciones de software pueden funcionar mejor que la otra en algunas circunstancias, para este modelo los resultados fueron en gran medida los mismos. Debido a la naturaleza enrevesada de la cueva, se tomaron casi 2000 fotografías. Según la norma para este proceso, cada fotografía se toma desde una posición diferente. La elección para la reconstrucción fue una malla triangular de 2 millones, esto fue para que se pueda usar convenientemente en experiencias navegables en tiempo real. Se creó una malla triangular de 5 millones para fines de archivo. En ambos casos, las texturas se crearon como cuatro imágenes 4K.  No hay duda de que los escáneres láser son más precisos. Dependiendo del modelo, se clasifican de manera confiable con un error máximo conocido. Dependiendo del escáner exacto y la configuración, puede estar en el rango de mm o incluso menos. Cuando se discute la precisión en este contexto, solo se aplica a partes del modelo visibles desde el escáner láser, ¿cómo se califica la naturaleza infinitamente inexacta de las partes del modelo que no son visibles? Para objetos muy enrevesados como el ejemplo utilizado aquí, se requiere un número potencialmente grande de ubicaciones de estaciones láser. Aunque se emplearon 6 ubicaciones en este ejemplo, hay muchas zonas de oclusión. A continuación se muestra una vista de la nube de puntos desde la posición de uno de los escáneres láser (izquierda), la imagen central y derecha son vistas desde diferentes posiciones que muestran partes del modelo que no son visibles desde ninguna de las posiciones del láser. 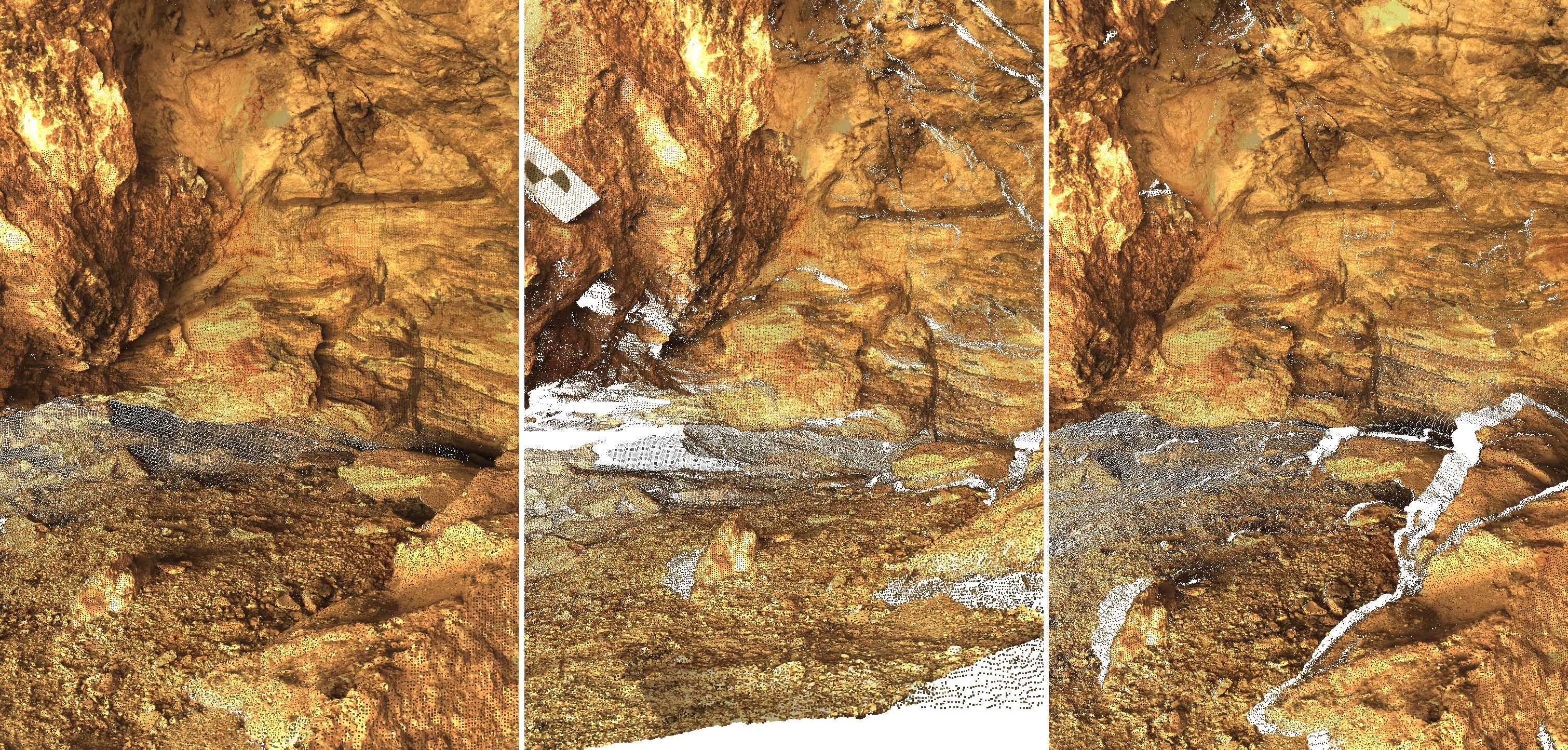 Reconstrucción 3D, realizado de manera óptima, tiene una ubicación de la cámara diferente para cada fotografía que resulta en un número mucho menor regiones de oclusión. Sin embargo, en 3D reconstruido modelos el error es más variable, más dependiente del tamaño del objeto y el número de fotografías tomadas y la habilidad del fotógrafo (ver más adelante). Reconstrucción 3D puede dar lugar a escala global y errores de distorsión, es decir, la distorsión en la escala de todo el objeto. Tales cuestiones de escala y de distorsión pueden abordarse con técnicas más rigurosas que incluyen marcadores de referencia geolocalizados o longitudes de dimensiones conocidas. Esto no se llevó a cabo aquí, debido al impacto negativo sobre otras características deseables de reconstrucción en 3D, es decir, la captura de velocidad y equipos limitaciones. Calidad de texturaLa calidad de la textura de las superficies reconstruidas en 3D se acepta como superior a los escáneres láser. En el primero, depende de la resolución de la cámara y del tamaño de los parches que se fotografían. La calidad de las texturas también depende de la habilidad del fotógrafo, mientras que para un láser de exploración es más consistente. Pueden producirse errores en la textura de la malla resultante, que generalmente se introducen en la etapa de reproyección del algoritmo donde las fotografías de las cámaras y la necesidad de combinar las partes elegidas de las fotografías a través de la malla 3D. Esto es similar a los errores que surgen de la deformación y la mezcla en la fotografía panorámica. Para el escaneo láser, la resolución del color es por punto. En general, la cámara para un escáner láser está desviada del haz de exploración, por lo que pueden producirse errores debidos a paralaje. Condiciones de iluminaciónComparar cómo funcionan las dos técnicas en diferentes condiciones de iluminación es más difícil y depende del escáner láser que se utilice. Para espacios de tono negro un escáner láser funcionará con menos problemas, mientras que las fotografías sería problemático sobre todo si de mano, que mantiene el autor es importante que el tiempo requerido para la captura. En comparación escáneres láser generalmente tienen más problemas con espacios muy iluminadas como la luz solar directa, mientras que la fotografía se beneficia de esto mediante el empleo de pequeñas aberturas y una mejor profundidad de foco. En ambos casos, las variaciones en la iluminación afectan el color del resultado final, esto suele ser más marcado en el caso de la reconstrucción 3D. Materiales reflectantes u oscurosAmbas técnicas sufren de ciertos tipos de materiales. La reconstrucción 3D falla con las superficies reflectantes, ya que la etapa de punto de característica identificará las características dentro de los reflejos con el resultado de un cálculo de profundidad incorrecto. Esto es doblemente problemático para superficies reflectantes curvas donde las profundidades de los puntos característicos divergen. El escaneo láser también sufre de superficies reflectantes, pero los problemas surgirán antes con la reconstrucción 3D. Ambas técnicas pueden tener problemas con superficies muy oscuras (que absorben la luz), el escáner láser no recibe una señal de retorno y, en el caso de las reconstrucciones 3D, no se pueden detectar puntos característicos entre las fotografías. Nube de puntos o malla de superficieUna diferencia clave entre las dos técnicas es el tipo de datos que entregan. En un caso, una nube de puntos coloreados (x, y, z, r, g, b), en el otro una superficie de malla texturizada. Si bien la nube de puntos de un escaneo láser todavía se puede convertir en una malla, el problema es más difícil que derivar una malla durante el proceso de reconstrucción 3D debido a que hay menos información disponible. La textura de la malla también sería inferior debido a la naturaleza por punto de la información de color. Hay una serie de aplicaciones para las cuales una malla de superficie texturizada es más útil, o incluso necesaria. Estos incluyen el uso del modelo 3D en canalizaciones de representación 3D o como entornos interactivos de realidad virtual. Las mallas texturizadas no solo son más compatibles, sino que también tienen la ventaja de no volverse “más delgadas” a medida que uno se acerca. Las nubes de puntos coloreadas pueden aparecer sólidas cuando están lo suficientemente lejos en comparación con la resolución de la pantalla. O cuando son adecuadamente densos, pero esto plantea problemas sobre el volumen de datos y la eficacia con la que se representa la superficie. Por ejemplo, los 110 millones de puntos aquí normalmente no se considerarían un escaneo láser particularmente denso, pero la navegación interactiva en una nube de puntos de este tipo es una carga gráfica significativamente mayor que una malla triangular de 2 millones, la última tiene un atractivo visual considerablemente mayor. 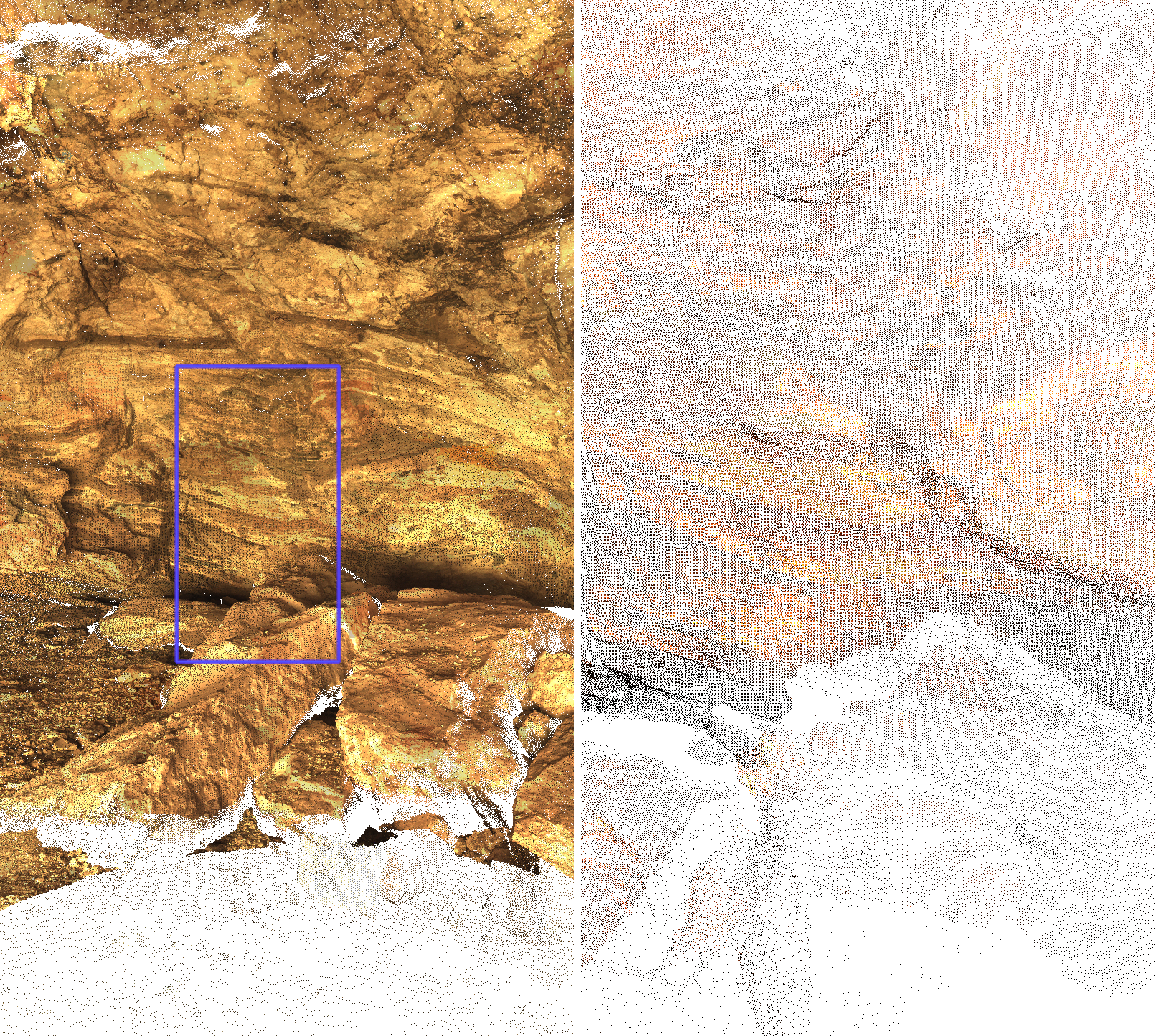
El acercamiento a una malla texturizada a partir de la reconstrucción 3D da como resultado el aspecto borroso de la imagen habitual que se produce al hacer zoom en cualquier imagen cuando un píxel de la imagen comienza a abarcar más de un píxel de visualización. 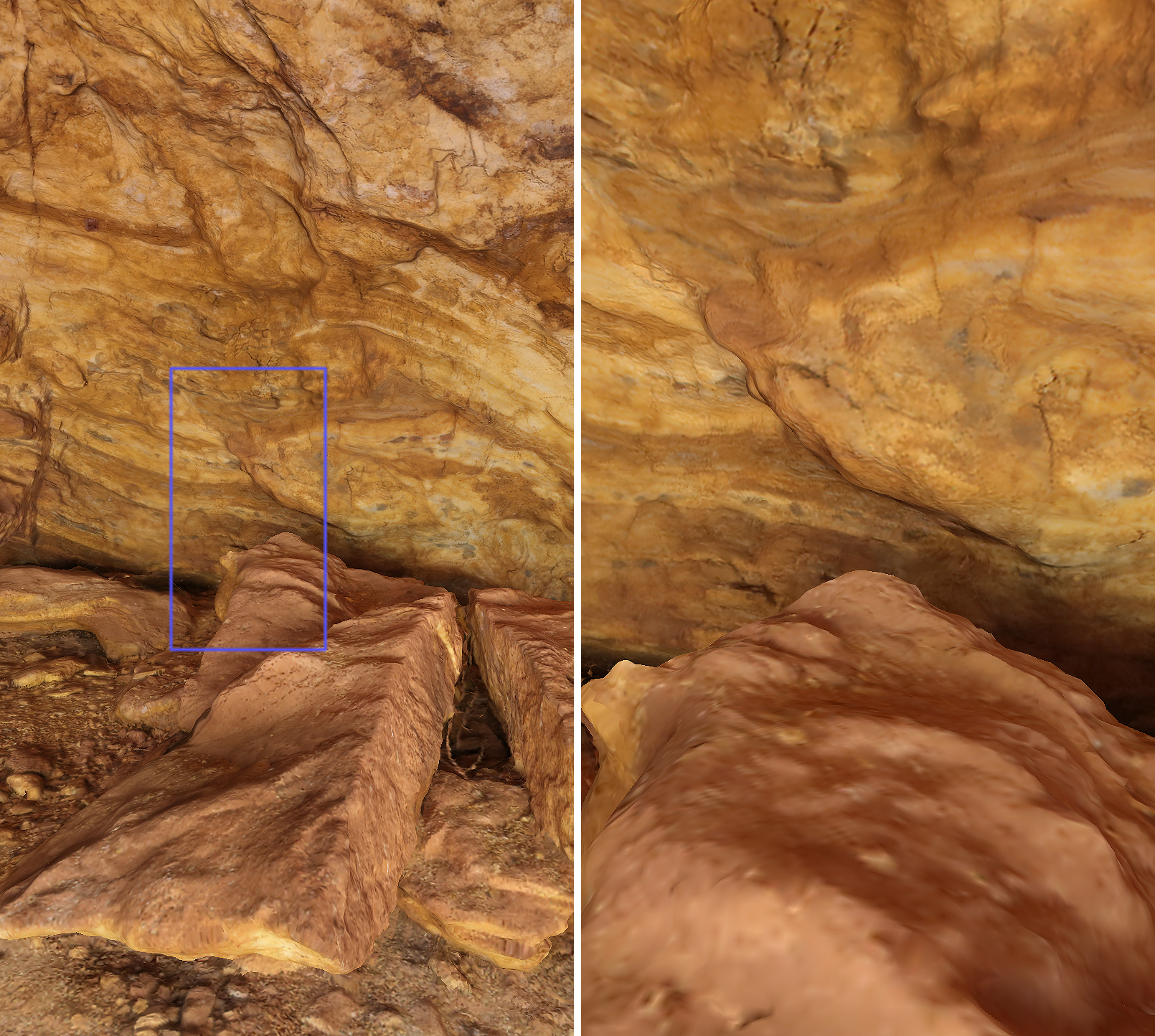 Una ventaja de los escaneos láser es que generalmente capturarán más de la escena de lo requerido. La fotografía para la reconstrucción 3D está más enfocada en el tema en cuestión. En el ejemplo aquí y que se muestra a continuación, se registran los árboles y un área más amplia frente al refugio. Si bien los árboles no son verdaderos objetos 3D, sí forman parte del contexto del sitio. Tenga en cuenta que en la figura debajo de la nube de puntos se ha recortado, se han registrado algunos objetos aún más distantes. 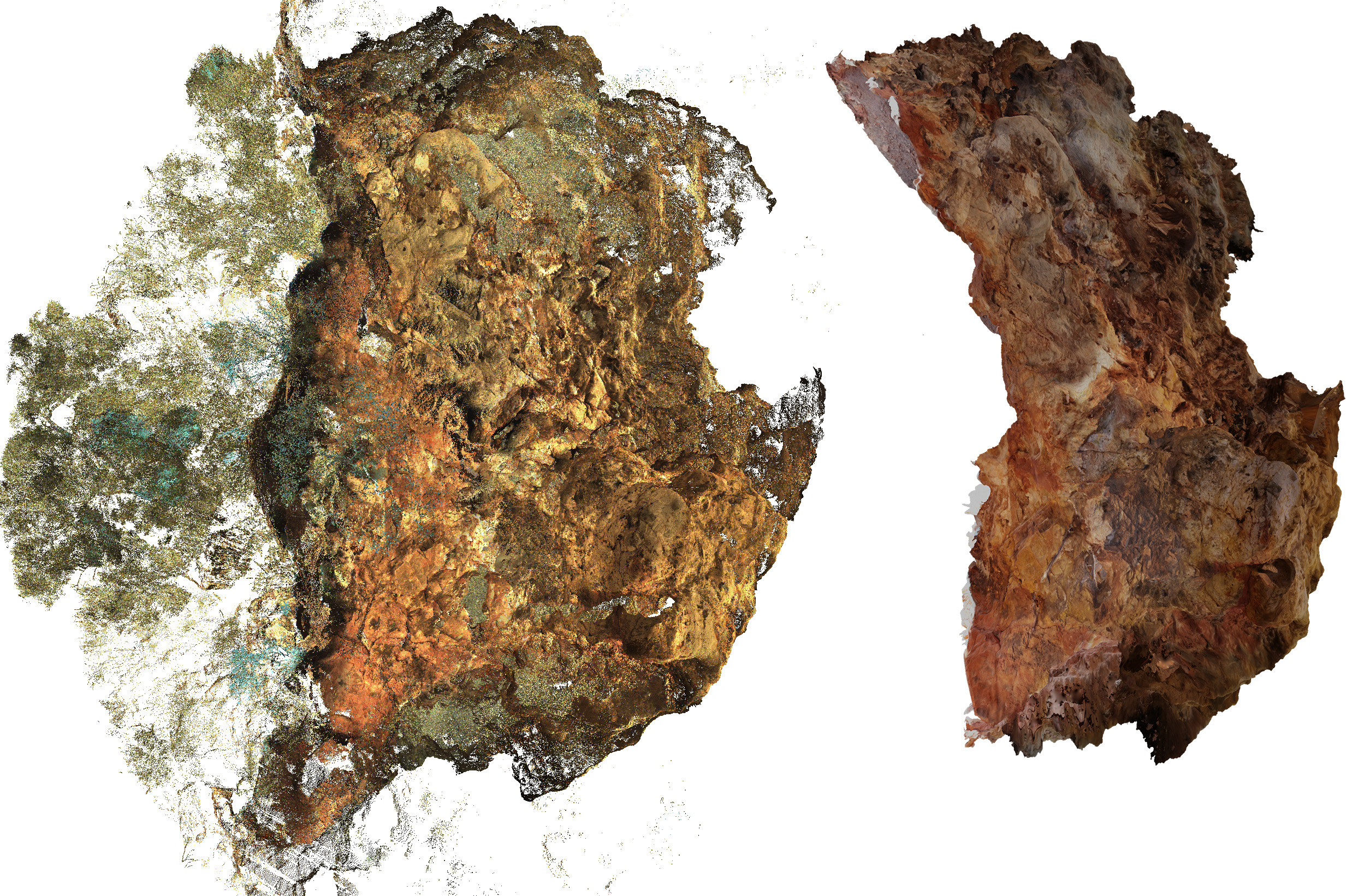 Ambas tecnologías luchan para manejar oclusores aislados en primer plano, en este caso, dicen un tronco de árbol en la entrada de los refugios. El escaneo láser requeriría varias posiciones de escaneo láser alrededor del oclusor para capturar la forma en todos los lados. Para la reconstrucción 3D, el límite se relaciona más con los algoritmos y su capacidad para crear puntos de características que conectan el oclusor con el resto de la escena. Costo del equipoUna buena cámara réflex y una lente principal adaptadas a la reconstrucción en 3D cuestan mucho menos que un escáner láser. Tiempo para realizarEn el ejemplo aquí, para lograr cobertura para la forma enrevesada del refugio rocoso, se realizaron 6 escaneos desde posiciones destinadas a minimizar los puntos ciegos. La fotografía tomó menos de 30 minutos, cada posición de escaneo láser tomó alrededor de 1 hora una vez que se incluye el tiempo de configuración y calibración. En resumen, 30 minutos en comparación con un día. Los tiempos de procesamiento posterior son comparables entre las dos técnicas, ambas pueden ser significativas. EquipoPesadez de los escáneres láser y el hardware asociado (trípodes pesados, baterías) para la implementación remota, especialmente a través de terrenos difíciles, puede ser bastante difícil. Reconstrucción 3D sólo requiere una sola cámara SLR y una lente modesta, o dos. Trípodes de fotografía para la reconstrucción 3D se utilizan raramente excepto en luz entornos desafiado y no eran necesarios en este ejemplo a pesar de la materia que tiene una variación de iluminación intensa de la luz solar directa a la sombra dentro del refugio. Invasividad Ambas técnicas se consideran no invasivas. Ambos requieren un operador humano en el espacio, el escaneo láser requiere además un trípode. Puede haber casos en los que el rayo láser pueda dañar la superficie capturada, pero eso es raro y ciertamente no es una consideración en el ejemplo aquí. Se considera la seguridad del rayo láser con humanos cercanos. Igualmente para las reconstrucciones 3D, uno no quiere que las personas se muevan dentro del espacio. Ambas técnicas pueden manejar un grado de movimiento en el entorno siempre que no esté en la dirección de exploración actual o en el área que se está fotografiando actualmente. Experiencia del operadorUn escáner láser generalmente lo realiza alguien que ha completado un curso sobre la operación correcta. Por el contrario, la informalidad y la falta de hardware especializado con el que se pueda intentar la reconstrucción en 3D significa que a menudo la fotografía no se realiza de manera óptima. Hay muy pocos cursos en los que uno aprende las técnicas, y al igual que otras áreas de la fotografía, existe una habilidad que se adquiere a través de la práctica. Por ejemplo, dos modelos fotográficamente adquiridos por diferentes operadores mostrarán mucha más variación en la calidad que el modelo adquirido por dos operadores diferentes de escaneo láser. El aspecto no especializado de la reconstrucción 3D puede considerarse una ventaja, pero una consecuencia es que a menudo se emplea una mala técnica fotográfica. Esto no solo da como resultado modelos 3D no óptimos, sino que también puede sesgar la comparación con el escaneo láser. SummaryDejando de lado los entornos o superficies donde una u otra tecnología de captura puede fallar, la reconstrucción 3D basada en fotografías tiene muchas ventajas. En opinión de los autores, el factor decisivo es el propósito previsto del modelo 3D. Si la intención es un modelo 3D para experiencias en tiempo real o dar una idea del lugar u objeto, las mallas texturizadas son muy superiores. Si la intención es una representación de calidad topográfica con la capacidad de realizar mediciones dentro de una tolerancia de error confiable, entonces el escaneo láser es la opción más clara. La alternativa, por supuesto, es desplegar ambas técnicas tal como ocurrieron para la grabación de los refugios de rocas, una de las cuales se presentó como ejemplo. |