Fotografia panoràmica inversa o panoramas d’objectesEscrito por Paul Bourke
Les panoràmiques cilíndriques s’entenen molt bé i s’utilitzen àmpliament per capturar un camp de visió limitat verticalment, però amb 360 graus en horitzontal. Normalment es fan fent girar una càmera al voltant d’un sol punt. Tot i que el mètode pràctic pot variar, conceptualment cada posició de la càmera captura una escletxa vertical estreta, totes les ranures s’alineen una darrere l’altra. Aquí presento panoràmiques d’objectes, o perquè es poden considerar com una captura panoràmica tradicional però panoràmiques invertides, inverses. Concretament, en comptes d’una càmera central i una escena externa, aquí tenim una càmera que es mou al voltant d’un objecte mirant cap a dins. Una manera de crear aquestes panoràmiques d’objectes seria prendre una imatge en perspectiva o ortogràfica mentre l’objecte gira. Es pot col·locar una sola escletxa vertical de cada fotografia una al costat de l’altra per formar una imatge contínua (suposant l’amplada de la ranura correcta). Això és essencialment el mateix que l’anomenada fotografia d’escaneig de ranura. Una altra manera de veure-ho és com una representació multi-perspectiva. Cada píxel de la imatge correspon a una posició de càmera, en el cas d’una panoràmica d’objectes cilíndrics totes les càmeres (una per cada píxel) són horitzontals i estan dirigides a una línia d’eix central. En els exemples que es mostren aquí, s’utilitza un model de textura 3D per demostrar el resultat. Tanmateix, es poden utilitzar objectes reals col·locant-los en un tocadiscos motoritzat i filmant amb una càmera de vídeo seguit de l’enfocament d’escaneig de ranura descrit anteriorment per a cada fotograma del vídeo. 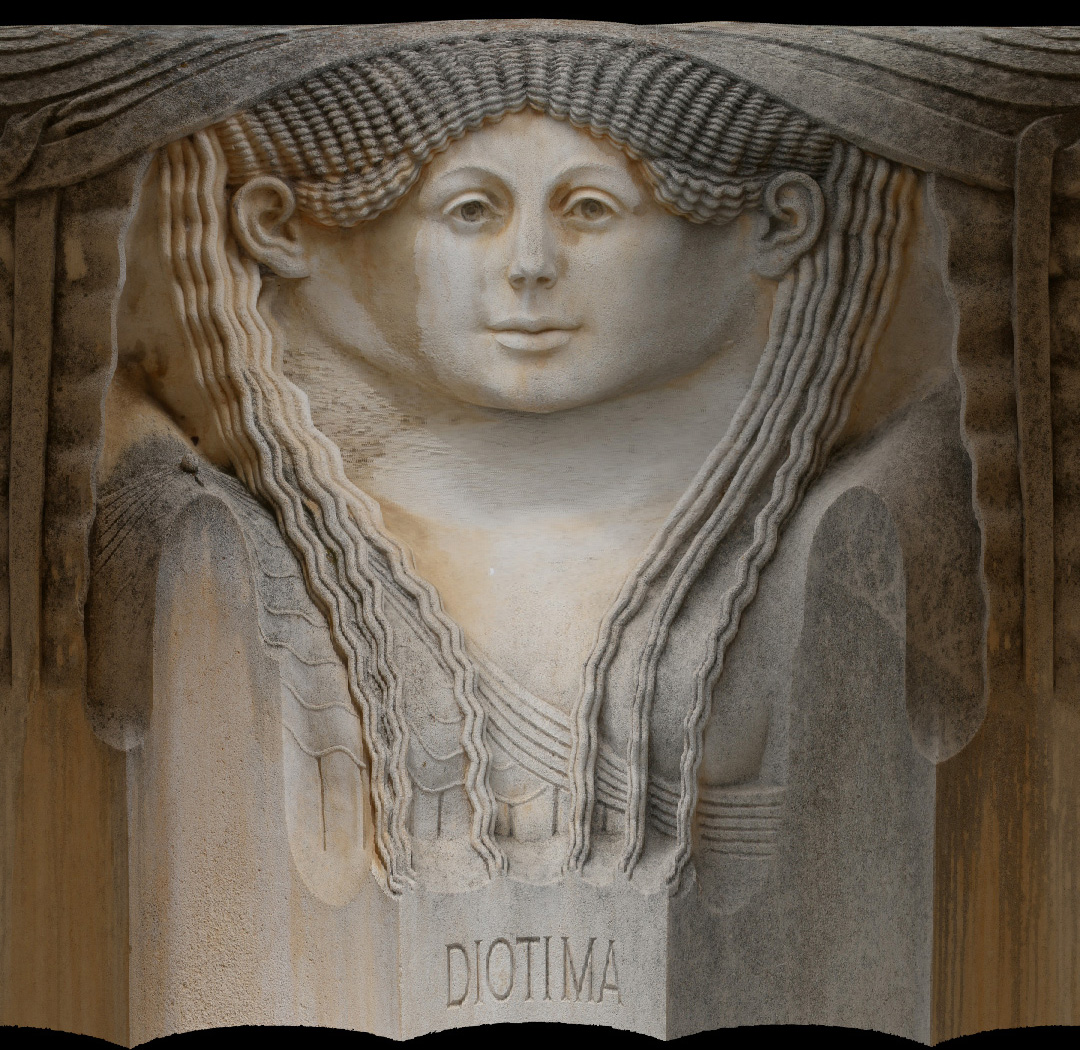
Igual que les panoràmiques tradicionals, aquestes també s’emboliquen en 360 graus, la vora esquerra és adjacent a la vora dreta. 
Les imatges creades aquí eren el codi propi de l’autor que, per a cada píxel de la imatge de sortida, es calcula el raig corresponent (posició i direcció). Aleshores, aquest raig es talla amb tots els triangles del model (fitxer OBJ), un cop es determina la intersecció més propera (primera) el color es busca donades les coordenades UV i la imatge de textura. La nova (i emocionant) «mesh_camera» de PovRay es pot utilitzar per aconseguir el mateix. Aquesta càmera permet especificar la posició del raig de la càmera donat el triangle en una malla{}, la direcció del raig ve determinada per la normal (per tant, tots els triangles s’han d’ordenar de manera coherent), encara que el raig es pot invertir amb el signe de la z coordinar a la directiva de direcció.
object {
#include "teresa.inc"
}
camera {
mesh_camera {
1
0
#include "themesh.inc"
}
location <0,0,0>
direction <0,0,-1>
}

Cal tenir en compte que a la superfície es podria imaginar que es podrien crear amb una representació panoràmica cilíndrica estàndard des del centre de l’objecte. Però en aquest cas s’hauria de cartografiar l’interior, no l’exterior. Una diferència són les estructures que poden ser visibles des de l’exterior però que estan ocluses per altres estructures a l’interior, per exemple, parts còncaves del model. 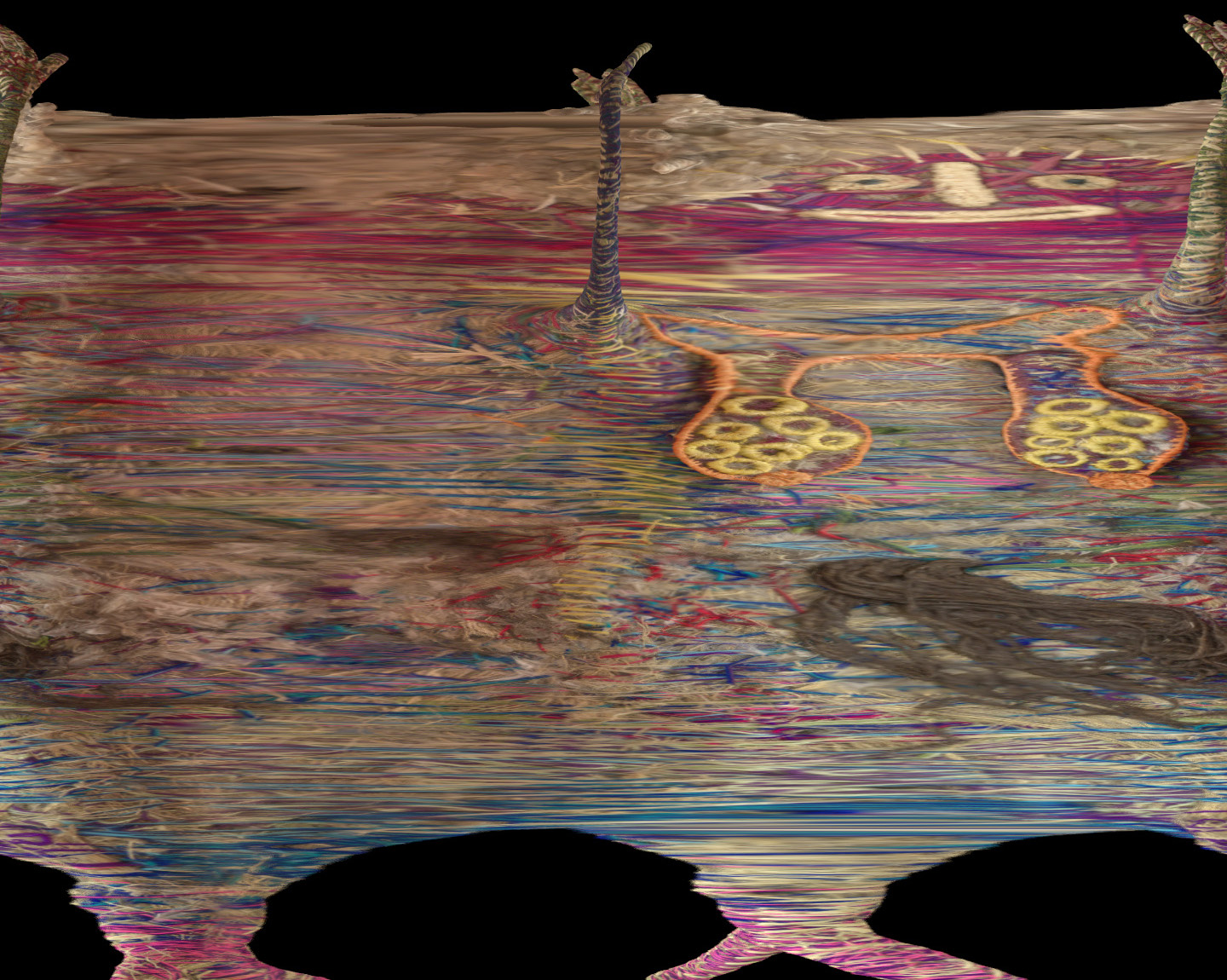
Per descomptat, no es limita a un panorama cilíndric, també es pot generar un panorama equirectangular complet. Cada píxel correspon a un origen de raig en una esfera, la direcció del raig és cap al centre del model. 
Aquests models es van crear a partir de la reconstrucció 3D i la base no s’ha tancat. La naturalesa buida és la causa dels defectes aparents a la part inferior de la imatge. 
|